Albero di copertura
A questo punto risulterà normale chiedersi se sia possibile creare una struttura dati (albero e grafo) anche per le reti illimitate, cui nodi rappresenteranno gruppi di stati potenzialmente infiniti.
È bene introdurre il concetto di copertura prima di procedere.
Una marcatura \(M\) copre una marcatura \(M’\) se e solo se:
$$ \forall p \in P \quad M(p) \geq M’(p). $$
Ovvero se per ogni posto in \(P\), la marcatura \(M(p)\) è maggiore o uguale a \(M’(p)\).
Al contrario, \(M\) si dice copribile da \(M’\) se e solo se:
$$ \exists M\smash{‘’} \! \in R(M’) \: \vert \: M’’ \! \textit{ copre } M. $$
Grazie al concetto di copertura è possibile ridefinire quello di transizione morte:
una transizione \(t\) si dice morta se e solo se data la sua marcatura minima \(M\) (ovvero il minor numero di gettoni necessario in ogni posto nel suo preset per abilitarla) questa non è copribile a partire dalla marcatura corrente.
In caso contrario la transizione \(t\) è almeno 1-viva.
Si conclude quindi che se una marcatura ne copre un’altra, tutte le azioni possibili nella prima sono possibili anche nella seconda.
È quindi possibile modificare l’albero di raggiungibilità in modo tale che, quando viene creato un nodo è necessario verificare se tra i suoi predecessori ne esiste uno che lo copre, allora a questo punto nei posti dove c’è copertura propria (ovvero \(M(p) \geq M’(p)\)) si mette \(\omega\).
Il simbolo \(\omega\) rappresenta un numero grande a piacere (e non qualsiasi), che può aumentare all’infinito: questo aspetto è da tenere in considerazione quando bisogna cercare quali transizioni sono abilitate da esso.
Questo tipo di notazione (\(\omega\)) viene introdotta per limitare l’aumento spropositato di nodi nel diagramma, comprimendo marcature uguali se non per \(\omega\).
Se una marcatura \(M\) copre una precedente \(M’\), infatti, è possibile ripetere gli scatti delle transizioni in \(M’\) per arrivare ad \(M\); se al termine di questa operazione sono presenti più gettoni in un posto, allora è possibile crearne un numero grande a piacere.
È importante notare come le transizioni che erano abilitate in una certa marcatura \(M’\) lo saranno anche in una marcatura diversa che copre \(M’\), a meno che non ci siano archi inibitori.
È ora possibile definire l’algoritmo per la creazione di un albero di copertura, comunque simile in molti punti al precedente:
-
crea la radice dell’albero corrispondente alla marcatura iniziale \(M_0\) ed etichettala come nuova;
-
finché esistono nodi etichettati come “nuovi” esegui:
-
seleziona una marcatura \(M\) etichettata come “nuova”;
prendila in considerazione e rimuovi l’etichetta “nuova”. -
se la marcatura \(M\) è identica ad una marcatura di un altro nodo allora:
- etichetta \(M\) come “duplicata”;
- continua passando alla prossima iterazione.
-
se nella marcatura \(M\) non è abilitata nessuna transizione allora:
-
etichetta \(M\) come “finale”;
altrimenti esegui:
-
finché esistono transizioni abilitate in \(M\) esegui:
-
per ogni transizione \(t\) abilitata in \(M\) esegui:
-
crea la marcatura \(M’\) prodotta dallo scatto di \(t\);
-
se sul cammino dalla radice (\(M_0\)) alla marcatura \(M\)
esiste una marcatura \(M’‘\) coperta da \(M’\) allora-
aggiungi \(\omega\) in tutte le posizioni corrispondenti a coperture proprie;
-
-
crea un nuovo nodo corrispondente alla marcatura \(M’\);
-
aggiungi un arco nell’albero al nodo corrispondente di \(M\) al nodo di \(M’\);
-
etichetta la marcatura \(M’\) come “nuova”.
-
-
-
-
Dall’albero generato da questo algoritmo è possibile arrivare al grafo di copertura.
Inoltre, ripetendo l’algoritmo precedente su una rete limitata viene generato un grafo di copertura senza \(\omega\) e quindi equivalente a un albero di raggiungibilità.
L’algoritmo termina in ogni caso: è sufficiente osservare l’albero risultante per stabilire se la rete considerata è limitata oppure no.
Esempio
Partendo dalla rete di Petri sottostante ed applicando l’algoritmo appena descritto è possibile arrivare ad un albero di copertura.
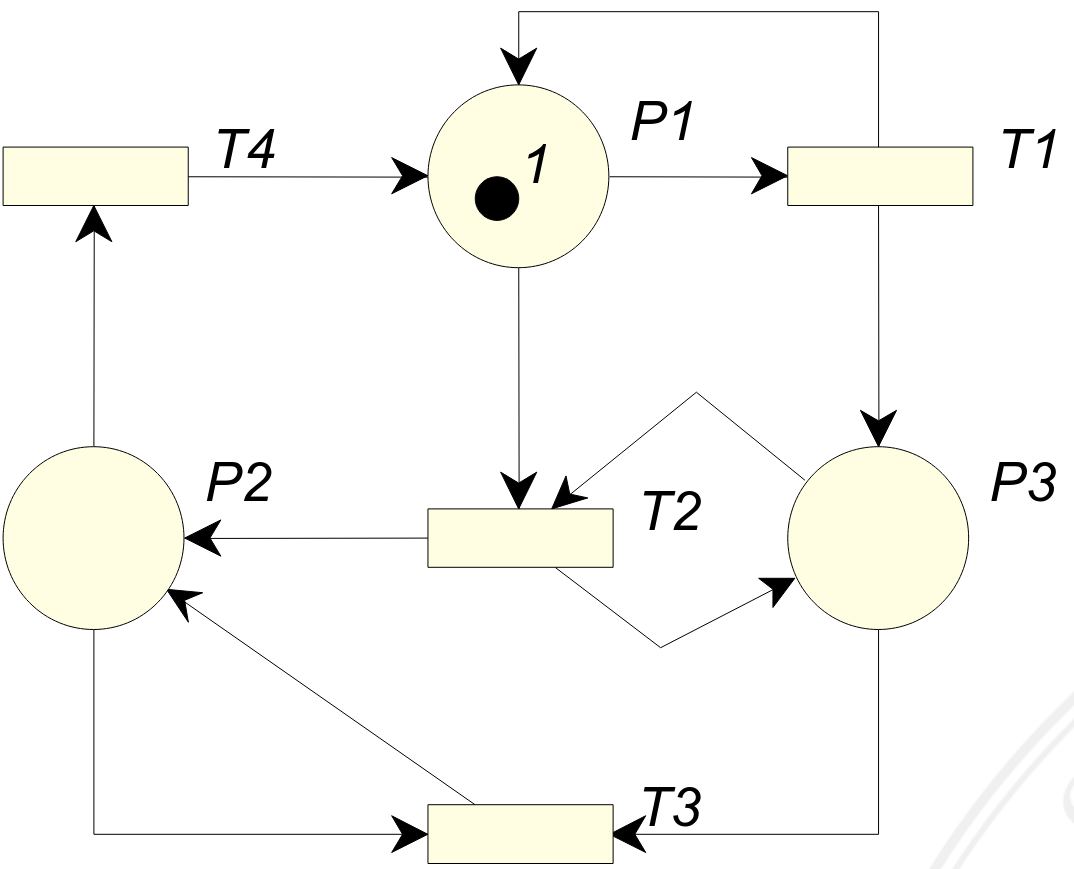
Come visto nell’esempio della creazione di un albero di raggiungibilità, il primo passo da fare è creare il nodo radice corrispondente alla marcatura iniziale (\(\nodenew{100}\)) e marcarlo come nuovo.
Successivamente, è necessario considerare l’unico nodo esistente (\(\node{100}\)) e iterare tra le sue transizioni.
In questo caso, è abilitata la transizione \(t_1\) che porta a una marcatura \(M’ = \nodenew{101}\).
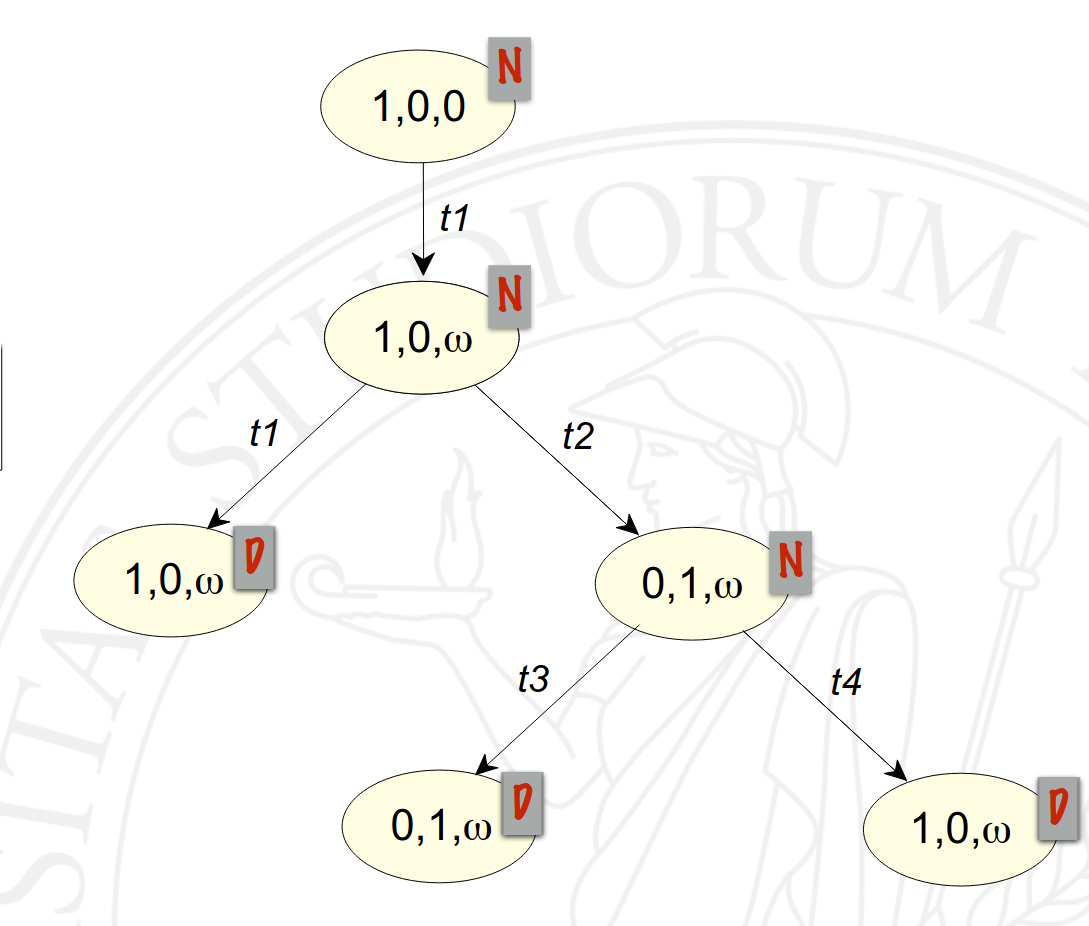
A questo punto si può notare come la radice sia una marcatura coperta da \(M’\), in quanto:
- \(M \: \vert \: 1 \geq 1 \: \vert \: M’\);
- \(M \: \vert \: 0\geq 0 \: \vert \: M’\);
- \(M \: \vert \: 1 > 0 \: \vert \: M’\).
Nel nodo corrispondente alla marcatura \(M’\) è quindi possibile sostituire l’unica copertura propria (quella con il \(>\) e non il \(\geq\)) con il simbolo \(\omega\) e marcare il nodo. Questa è l’unica parte dell’algoritmo differente da quello che genera l’albero di raggiungibilità: il resto dell’esempio è quindi completato dall’immagine sottostante.
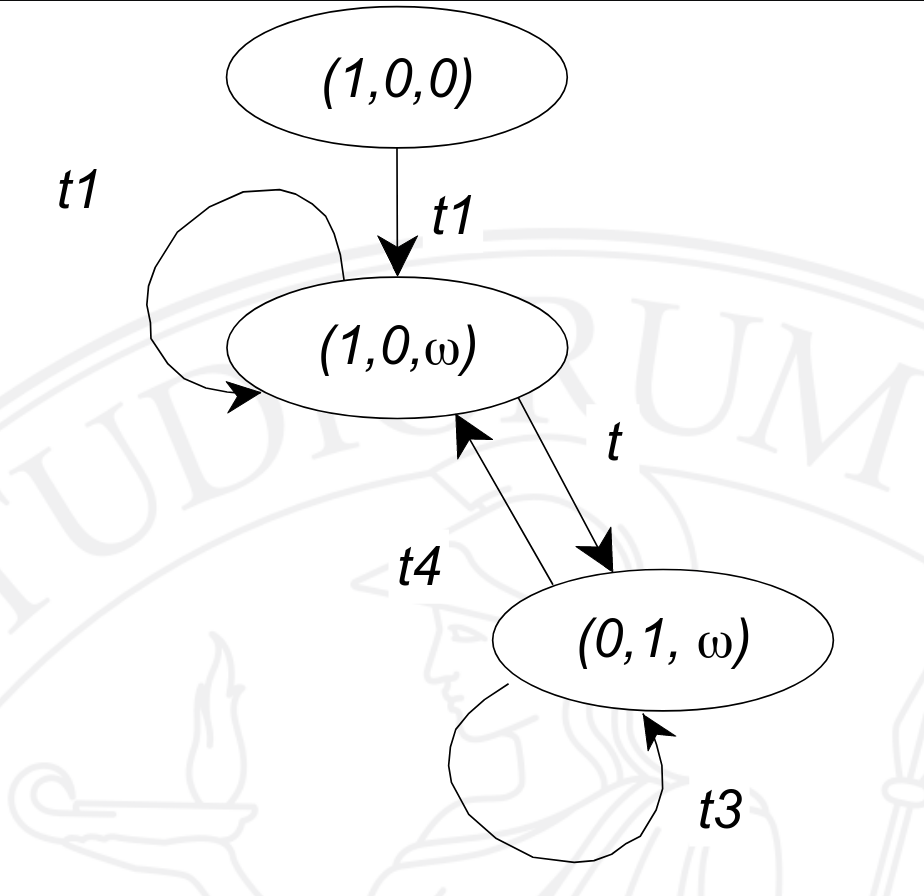
Tramite lo stesso procedimento attuato per gli alberi di raggiungibilità, è possibile trasformare il precedente albero in un grafo di copertura.
Considerazioni
- se \(\omega\) non compare mai nell’albero di copertura la rete è limitata;
- una rete di Petri è binaria se nell’albero di copertura compaiono solo 0 e 1;
- una transizione è morta (0-viva) se non compare mai come etichetta di un arco dell’albero di copertura;
- condizione necessaria affinché una marcatura \(M\) sia raggiungibile è l’esistenza di un nodo etichettato con una marcatura che copre \(M\) (non sufficiente: le marcature coperte non sono necessariamente raggiungibili);
- non è possibile stabilire se una rete è viva.
Esempio particolare
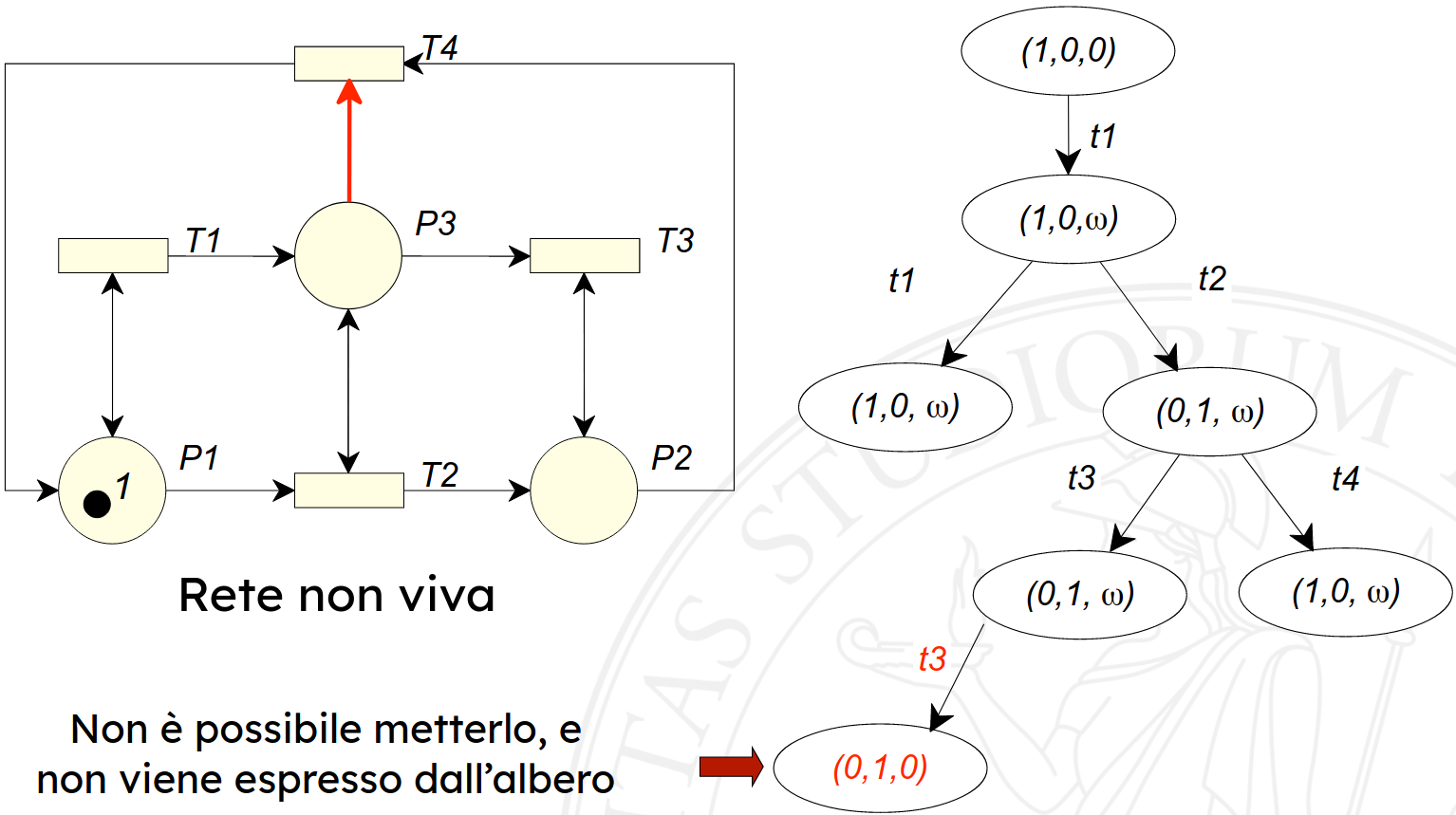
È doveroso un ulteriore esempio particolare nel caso di reti non vive.
Data una rete non viva (come nella figura sotto) dall’albero di copertura non è possibile evincere se la rete è effettivamente viva o no: infatti se il nodo \(\node{01$\omega$}\) è duplicato, quindi non verrà più espanso.
A questo punto non è possibile aggiungere all’interno dell’albero il nodo \(\node{010}\), in cui la rete raggiunge un deadlock.
Questo però significa che questo albero di copertura è uguale a quello della stessa rete senza arco che collega \(p_3\) a \(t_4\), che in quel caso è una rete viva.
Detto ciò si può affermare che tramite l’albero di copertura non è possibile dire se una rete è viva oppure no.
Da albero di copertura a rete
Passare dall’albero di copertura alla rete di Petri è un’operazione che rispetto all’inverso crea più incertezza. L’albero di copertura permette infatti di rappresentare reti potenzialmente illimitate, è quindi normale avere come risultato reti di cui non si conosce la struttura: molte reti potrebbero essere associate allo stesso albero.
Nel seguente esempio si può notare come la rete ricavata presenta degli archi tratteggiati: potrebbero essere presenti, oppure no. Inoltre, sono assenti anche i pesi negli archi. Tale mancanza di informazioni è dovuta in gran parte dalla presenza di \(\omega\): un nodo con all’interno \(\omega\) rappresenta diverse marcature.
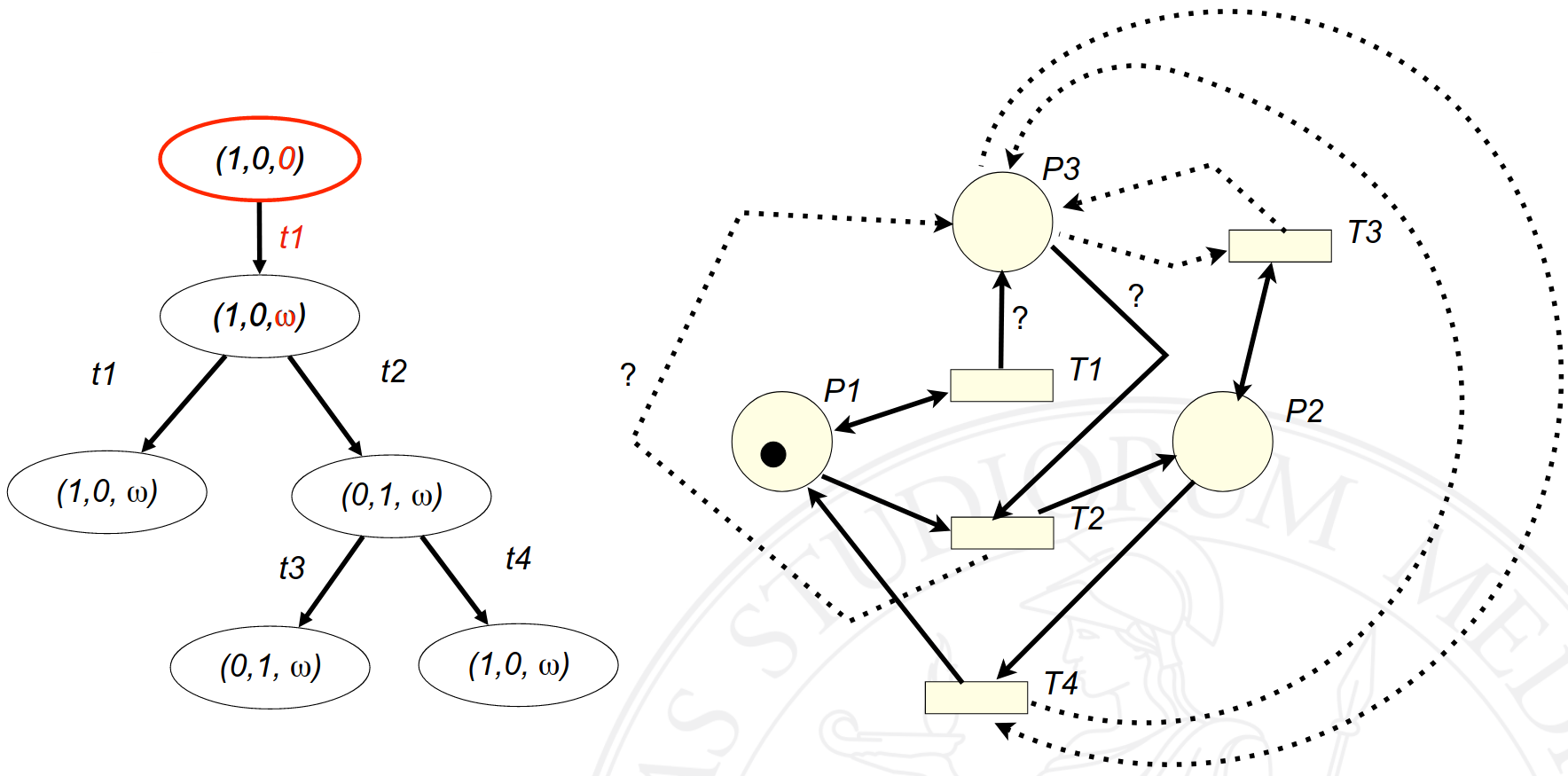
È importante notare come le marcature sicuramente raggiungibili siano quelle i cui nodi nell’albero di copertura non contengono \(\omega\): delle altre non si può essere certi.